Gsensor Software User Guide
Overview of Gsensor
Gsensor is a high-precision digital three-axis acceleration sensor, currently supporting the SC7A20 sensor. It uses I2C for data transmission and performs analysis on the collected data from the X, Y, and Z axes.
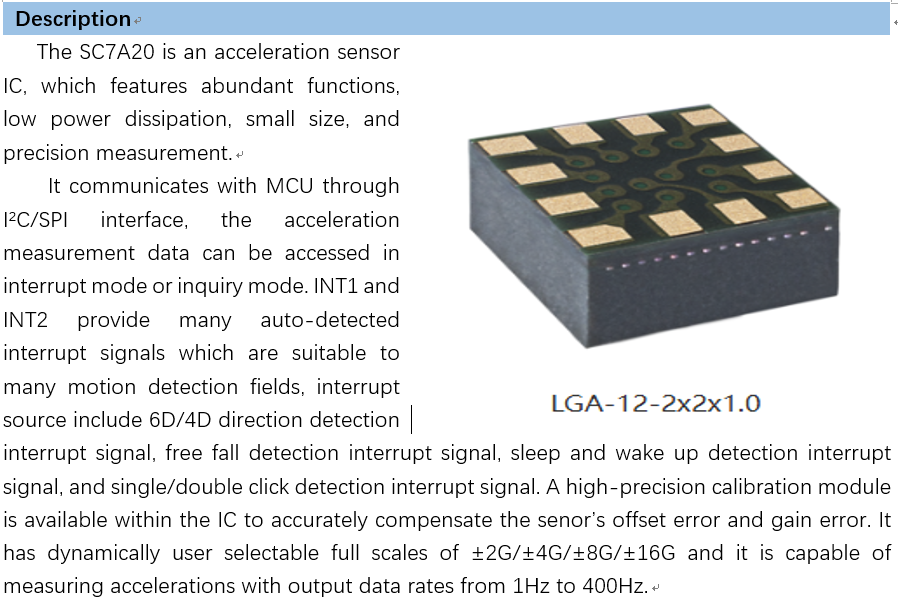
Gsensor SC7A20
Definitions of Macros
CONFIG_GSENSOR_ENABLE: Master switch for the Gsensor function CONFIG_GSENSOR_DEMO_EN: A demo that has already been implemented. Customers can decide whether to use this demo based on their own situation. CONFIG_GSENSOR_ARITHEMTIC_DEMO_EN: Algorithm recognition demo. Performs parsing on the data received from the sensor. CONFIG_GSENSOR_SC7A20_ENABLE: The sensor being used is SC7A20 CONFIG_GSENSOR_TEST_EN: Enables CLI test commands
Default configuration of macro switches: CONFIG_GSENSOR_ENABLE=y CONFIG_GSENSOR_DEMO_EN=y CONFIG_GSENSOR_ARITHEMTIC_DEMO_EN=y CONFIG_GSENSOR_TEST_EN=n CONFIG_GSENSOR_SC7A20_ENABLE=y
General Function Interfaces
These APIs are general-purpose interfaces designed for customer convenience, allowing for the adaptation of various types of Gsensors.
void bk_gsensor_init(); Initializes the Gsensor driver, hanging the name of the Gsensor used for subsequent operations. Designed for a universal interface for different types of Gsensors.
void bk_gsensor_deinit(); Unloads the Gsensor, unloading the pointer used during initialization.
int bk_gsensor_open(); Opens the Gsensor, completing basic register configurations for power supply.
void bk_gsensor_close(); Closes the Gsensor, stopping its operation.
int bk_gsensor_setDatarate(); Sets the data collection frequency of the Gsensor.
int bk_gsensor_setMode(); Sets the mode of the Gsensor, including normal operation mode and wake-up mode.
int bk_gsensor_setDateRange(); Sets the range of data collection for the Gsensor.
int bk_gsensor_registerCallback(); After receiving data, notifies the application layer through a callback function.
Gsensor Demo Interface Functions
bk_err_t gsensor_demo_init(void); Initializes the demo, registers the callback function, initializes the sensor, and creates the demo thread.
void gsensor_demo_deinit(void); Unloads the demo thread and unloads the callback function.
bk_err_t gsensor_demo_open(); Opens the Gsensor, sends basic configurations to the sensor.
bk_err_t gsensor_demo_close(); Closes the Gsensor, sends shutdown configurations to the sensor.
bk_err_t gsensor_demo_set_normal(); Sets the mode to normal operation.
bk_err_t gsensor_demo_set_wakeup(); Sets the mode to wake-up.
bk_err_t gsensor_demo_lowpower_wakeup(); Sets the mode to low-power wake-up.
Gsensor Arithmetic Demo Interface Functions
void arithmetic_module_init(void); Creates the algorithm processing thread.
void arithmetic_module_deinit(void); Unloads the algorithm processing thread.
int arithmetic_module_copy_data_send_msg(); Sends data to the algorithm processing thread through this interface.
void arithmetic_module_register_status_callback(); Registers a callback function for the status identified after algorithm processing.
void shake_arithmetic_set_parameter(); ets parameters for the shake recognition algorithm.
PS: There are other algorithms available for reference. Since the data performance of various Gsensors varies, algorithm parameters need to be adjusted based on actual conditions.