Double-Board Intertransfer Mission (Server)
1 功能概述
本工程展示两块BK7258板子之间视频单向传输,音频双向传输的的功能; server端不接入实体摄像头dvp/uvc,支持当前板子接入LCD屏实时显示client端传输过来的摄像头拍摄画面
1.1 规格
- 硬件配置:
核心板,BK7258_QFN88_9X9_V3.2
显示转接板,BK7258_LCD_Interface_V3.0
麦克小板,BK_Module_Microphone_V1.1
喇叭小板,BK_Module_Speaker_V1.1
PSRAM 8M/16M
支持,TCP局域网图传
支持,UDP局域网图传
- 支持,LCD RGB/MCU I8080显示
参考外设,ST7701SN,480 * 854 RGB LCD
RGB565/RGB888
- 支持,硬件旋转
0°,90°,180°,270°
支持,板载喇叭
支持,麦克
- 支持,MJPEG硬件解码
YUV422
- 支持,MJPEG软件解码
YUV420
1.2 路径
<bk_avdk源代码路径>/projects/media/av_server
2. 框架图
2.1 软件模块架构图
如下图所示,av_client负责采集USB摄像头图像,通过wifi传输给av_server, 同时av_client本地lcd会显示采集的图像,av_server显示av_client传输的图像
CPU0,运行WIFI/BLE,作为低功耗CPU。
CPU1,运行多媒体,作为多媒体高性能CPU。

Figure 1. software module architecture
2.2 代码模块关系图
如下图所示,多媒体的接口,都定义在 media_app.h 和 aud_intf.h 中。
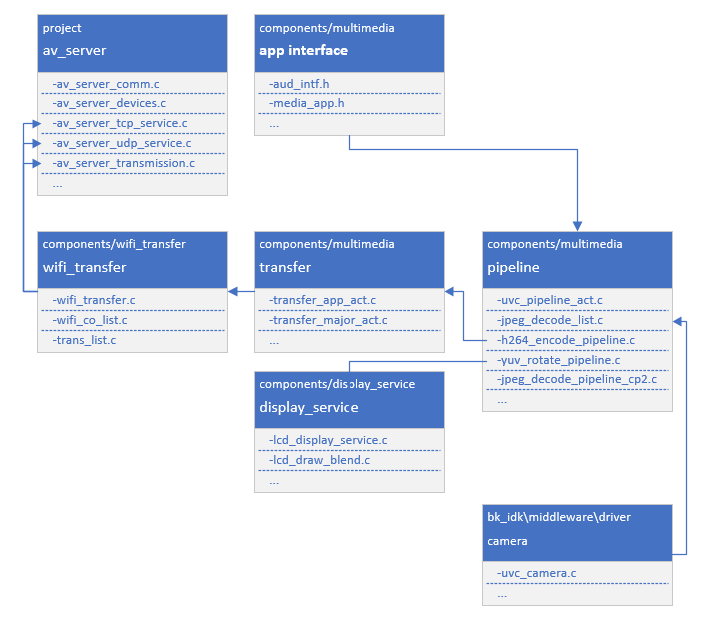
Figure 2. module relationship diagram
3. 配置
3.1 图像传输方式配置
在工程路径下config/bk7258/config,修改宏来配置图像传输方式,当前默认传输方式为UDP;
//使用UDP连接进行传输 CONFIG_AV_DEMO_MODE_UDP=y CONFIG_AV_DEMO_MODE_TCP=n
//使用TCP连接进行传输 CONFIG_AV_DEMO_MODE_UDP=n CONFIG_AV_DEMO_MODE_TCP=y
4. 演示说明
双板对传需要两个开发板,A开发板上下载av_client, B开发板上下载av_server;
B板为AP,固定SSID为”av_demo”,无密码,需要在A板前上电;需要连接LCD
A板为STA,固定连接SSID “av_demo”;需要连接USB摄像头和LCD
A板上电后默认连接B板的wifi,连接成功后打开摄像头和LCD, 在A板连接成功后,B板上LCD显示A板上USB输出的图像
5. 代码讲解
5.1 LCD显示
已支持的外设,请参考 支持外设
5.1.1 打开LCD
5.1.1.1 应用代码
//Path : projects/media/av_server/main/src/av_server_devices.c
//Loaction : CPU0
int av_server_display_turn_on(uint16_t id, uint16_t rotate, uint16_t fmt)
{
...
//设置显示的像素格式
if (fmt == 0)
{
media_app_lcd_fmt(PIXEL_FMT_RGB565_LE);
}
else if (fmt == 1)
{
media_app_lcd_fmt(PIXEL_FMT_RGB888);
}
//设置旋转的角度。
switch (rotate)
{
case 90:
rot_angle = ROTATE_90;
break;
case 180:
rot_angle = ROTATE_180;
break;
case 270:
rot_angle = ROTATE_270;
break;
case 0:
default:
rot_angle = ROTATE_NONE;
break;
}
media_app_pipline_set_rotate(rot_angle);
//打开本地LCD显示
media_app_lcd_pipeline_open(&lcd_open);
...
}
5.1.1.2 接口代码
//Path : components/multimedia/app/media_app.c
//Loaction : CPU0
bk_err_t media_app_lcd_pipeline_open(void *lcd_open)
{
...
//
ret = media_app_lcd_pipeline_disp_open(config);
//
ret = media_app_lcd_pipeline_jdec_open();
...
}
bk_err_t media_app_lcd_pipeline_disp_open(void *config)
{
...
//投票启动CPU1。投票的目的是,确保CPU1不用的时候能够被自动关闭,以达到低功耗的目的。
bk_pm_module_vote_boot_cp1_ctrl(PM_BOOT_CP1_MODULE_NAME_VIDP_LCD, PM_POWER_MODULE_STATE_ON);
//通知CPU1打开LCD
ret = media_send_msg_sync(EVENT_PIPELINE_LCD_DISP_OPEN_IND, (uint32_t)ptr);
...
}
bk_err_t media_app_lcd_pipeline_jdec_open(void)
{
int ret = BK_OK;
//投票启动CPU1。投票的目的是,确保CPU1不用的时候能够被自动关闭,以达到低功耗的目的。
bk_pm_module_vote_boot_cp1_ctrl(PM_BOOT_CP1_MODULE_NAME_VIDP_JPEG_DE, PM_POWER_MODULE_STATE_ON);
//设置旋转角度
ret = media_send_msg_sync(EVENT_PIPELINE_SET_ROTATE_IND, jpeg_decode_pipeline_param.rotate);
//打开显示依赖的旋转,缩放,解码模块
ret = media_send_msg_sync(EVENT_PIPELINE_LCD_JDEC_OPEN_IND, 0);
return ret;
}
5.2 Audio
5.2.1 打开UAC,板载MIC/SPEAKER
//Path : projects/media/av_client/main/src/av_server_devices.c
//Loaction : CPU0
int av_server_audio_turn_on(audio_parameters_t *parameters)
{
...
//启用AEC
if (parameters->aec == 1)
{
aud_voc_setup.aec_enable = true;
}
else
{
aud_voc_setup.aec_enable = false;
}
//设置SPEAKER单端模式
ud_voc_setup.spk_mode = AUD_DAC_WORK_MODE_SIGNAL_END;
//启用UAC
if (parameters->uac == 1)
{
aud_voc_setup.mic_type = AUD_INTF_MIC_TYPE_UAC;
aud_voc_setup.spk_type = AUD_INTF_SPK_TYPE_UAC;
}
else //启动板载MIC和SPEAKER
{
aud_voc_setup.mic_type = AUD_INTF_MIC_TYPE_BOARD;
aud_voc_setup.spk_type = AUD_INTF_SPK_TYPE_BOARD;
}
if (aud_voc_setup.mic_type == AUD_INTF_MIC_TYPE_BOARD && aud_voc_setup.spk_type == AUD_INTF_SPK_TYPE_BOARD) {
aud_voc_setup.data_type = parameters->rmt_recoder_fmt - 1;
}
//设置采样率
switch (parameters->rmt_recorder_sample_rate)
{
case DB_SAMPLE_RARE_8K:
aud_voc_setup.samp_rate = 8000;
break;
case DB_SAMPLE_RARE_16K:
aud_voc_setup.samp_rate = 16000;
break;
default:
aud_voc_setup.samp_rate = 8000;
break;
}
//注册MIC数据回调
aud_intf_drv_setup.aud_intf_tx_mic_data = av_client_udp_voice_send_callback;
...
}
5.2.2 获取上行MIC数据
//Path : projects/media/av_server/main/src/av_server_devices.c
//Loaction : CPU0
//注册MIC回调
aud_intf_drv_setup.aud_intf_tx_mic_data = av_client_udp_voice_send_callback;
ret = bk_aud_intf_drv_init(&aud_intf_drv_setup);
int av_server_udp_voice_send_callback(unsigned char *data, unsigned int len)
{
...
//通常实现的回调是往WIFI方向传输。
return db_device_info->audio_transfer_cb->send(buffer, len, &retry_cnt);
}
5.2.3 播放下行SPEAKER数据
//Path : projects/media/av_server/main/src/av_server_devices.c
//Loaction : CPU0
void av_server_audio_data_callback(uint8_t *data, uint32_t length)
{
...
//往SPEAKER送数据
ret = bk_aud_intf_write_spk_data(data, length);
...
}