I2S APIs
重要
The I2S API v1.0 is the lastest stable I2S APIs. All new applications should use I2S API v1.0.
I2S Interface
The BK I2S Driver supports following sample rates:
8K
12K
16K
24K
32K
48K
96K
8.0182K
11.025K
22.050K
44.1K
88.2K
The BK I2S Driver supports following work modes:
- I2S (Philips)
在此工作模式下信号传输时序图如
图1所示:
- Left Justified
在此工作模式下信号传输时序图如
图2所示:
- Right Justified
在此工作模式下信号传输时序图如
图3所示:
- Short Frame Sync
在此工作模式下信号传输时序图如
图4所示:
- Long Frame Sync
在此工作模式下信号传输时序图如
图5所示:
- Normal 2B+D
在此工作模式下信号传输时序图如
图6和图7所示:
- Delay 2B+D
在此工作模式下信号传输时序图如
图8和图9所示:

Figure 1. Philips mode time sequence diagram

Figure 2. Left Justified mode time sequence diagram

Figure 3. Right Justified mode time sequence diagram
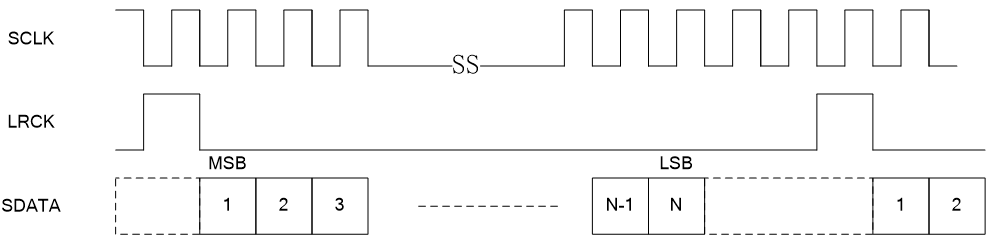
Figure 4. Short Frame Sync mode time sequence diagram
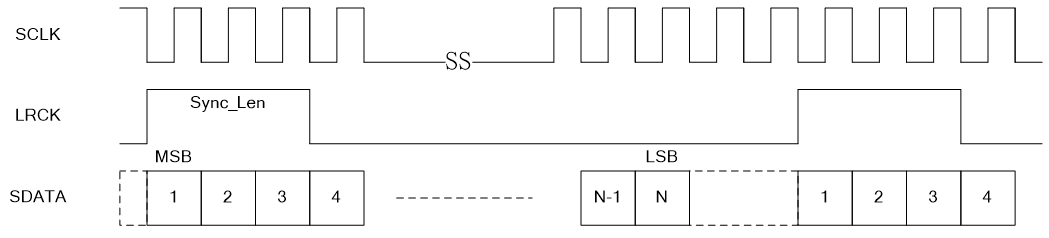
Figure 5. Long Frame Sync mode time sequence diagram

Figure 6. Normal 2B+D mode time sequence diagram

Figure 7. Normal 2B+D mode time sequence diagram

Figure 8. Delay 2B+D mode time sequence diagram

Figure 9. Delay 2B+D mode time sequence diagram
Each function can be operated independently. However both function share the same resources, only one function can exit and work at a time.
I2S API Categories
Most of I2S APIs can be categoried as:
I2S APIs
The common APIs are prefixed with bk_i2s, e.g. bk_i2s_driver_init() etc.
- I2S APIs:
bk_i2s_driver_init()- init i2s module driverbk_i2s_driver_deinit()- deinit i2s module driverbk_i2s_init()- init i2s modulebk_i2s_deinit()- deinit i2s modulebk_i2s_get_read_ready()- get the i2s Rx fifo statusbk_i2s_get_write_ready()- get the i2s Tx fifo statusbk_i2s_enable()- enable i2sbk_i2s_int_enable()- config i2s interruptbk_i2s_set_role()- config i2s work rolebk_i2s_set_work_mode()- config i2s work modebk_i2s_set_lrck_invert()- config i2s lrck invertbk_i2s_set_sck_invert()- config i2s sck invertbk_i2s_set_lsb_first()- config i2s lsb firstbk_i2s_set_sync_len()- config i2s sync lengthbk_i2s_set_data_len()- config i2s data lengthbk_i2s_set_pcm_dlen()- config i2s pcm D length of 2B+Dbk_i2s_set_store_mode()- config i2s store modebk_i2s_clear_rxfifo()- clear i2s rx fifobk_i2s_clear_txfifo()- clear i2s tx fifobk_i2s_set_txint_level()- config i2s tx interrupt levelbk_i2s_set_rxint_level()- config i2s rx interrupt levelbk_i2s_write_data()- write data to i2s tx fifobk_i2s_read_data()- read data from i2s rx fifobk_i2s_get_data_addr()- get i2s data addressbk_i2s_set_samp_rate()- config i2s sample ratebk_i2s_register_i2s_isr()- register i2s isrbk_i2s_chl_init()- i2s channel initbk_i2s_chl_deinit()- i2s channel deinitbk_i2s_start()- start i2s transferbk_i2s_stop()- stop i2s transfer
API Reference
Header File
Functions
-
bk_err_t bk_i2s_driver_init(void)
Init i2s module driver.
This API init i2s driver :
Power on clock
config apll clock
enable interrupts
- 返回
BK_OK: succeed
others: other errors.
-
bk_err_t bk_i2s_driver_deinit(void)
Deinit i2s module driver.
This API deinit i2s driver :
Power down clock
reconfig apll clock to defailt value
disable interrupts
- 返回
BK_OK: succeed
others: other errors.
-
bk_err_t bk_i2s_init(i2s_gpio_group_id_t id, const i2s_config_t *config)
Init i2s module.
This API init the i2s module:
Init gpios i2s used
Configure the i2s parameters
Usage example:
//init i2s driver bk_i2s_driver_init(); //init i2s configure i2s_config_t i2s_config; i2s_config.i2s_en = I2S_DISABLE; i2s_config.role = I2S_ROLE_MASTER; i2s_config.work_mode = I2S_WORK_MODE_I2S; i2s_config.lrck_invert = I2S_LRCK_INVERT_DISABLE; i2s_config.sck_invert = I2S_SCK_INVERT_DISABLE; i2s_config.lsb_first_en = I2S_LSB_FIRST_DISABLE; i2s_config.sync_length = 0; i2s_config.data_length = 15; i2s_config.pcm_dlength = 0; i2s_config.sample_ratio = 0; i2s_config.sck_ratio = 0; i2s_config.parallel_en = I2S_PARALLEL_DISABLE; i2s_config.store_mode = I2S_LRCOM_STORE_16R16L; i2s_config.sck_ratio_h4b = 0; i2s_config.sample_ratio_h2b = 0; i2s_config.txint_level = I2S_TXINT_LEVEL_1; i2s_config.rxint_level = I2S_RXINT_LEVEL_1; bk_i2s_init(I2S_GPIO_GROUP_0, &i2s_config); CLI_LOGI("init i2s driver and config successful \r\n");
- 参数
id – gpio config “GPIO6, GPIO7, GPIO8, GPIO9”/”GPIO40, GPIO41, GPIO42, GPIO43”
config – i2s parameters include work role, work mode and so on
- 返回
BK_OK: succeed
BK_ERR_I2S_PARAM: config is NULL
BK_ERR_I2S_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_deinit(void)
Deinit i2s module.
This API deinit the i2s module:
reconfig i2s parameters to default value
- 返回
BK_OK: succeed
others: other errors.
-
bk_err_t bk_i2s_get_read_ready(uint32_t *read_flag)
Get the i2s Rx fifo status.
This API get the i2s Rx fifo status that check whether the fifo data can be read
- 参数
read_flag – save Rx fifo status
- 返回
BK_OK: succeed
BK_ERR_I2S_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_get_write_ready(uint32_t *write_flag)
Get the i2s Tx fifo status.
This API get the i2s Tx fifo status that check whether the fifo data can be write
- 参数
read_flag – save Tx fifo status
- 返回
BK_OK: succeed
BK_ERR_I2S_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_enable(i2s_en_t en_value)
Enable i2s.
This API enable i2s
- 参数
en_value – disable/enable i2s
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_int_enable(i2s_isr_id_t int_id, uint32_t value)
Config i2s interrupt.
This API config i2s interrupt
- 参数
int_id – interrupt id
value – 0:disable 1:enable
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_role(i2s_role_t role)
Config i2s work role.
This API config i2s work role
- 参数
role – work role slave/master
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_work_mode(i2s_work_mode_t work_mode)
Config i2s work mode.
This API config i2s work mode
- 参数
work_mode – i2s work mode
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_lrck_invert(i2s_lrck_invert_en_t lrckrp)
Config i2s lrck invert.
This API config i2s lrck invert
- 参数
lrckrp – i2s lrck invert enable/disable
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_sck_invert(i2s_sck_invert_en_t sck_invert)
Config i2s sck invert.
This API config i2s sck invert
- 参数
sck_invert – i2s sck invert enable/disable
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_lsb_first(i2s_lsb_first_en_t lsb_first)
Config i2s lsb first.
This API config i2s lsb first
- 参数
lsb_first – i2s lsb first enable/disable
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_sync_len(uint32_t sync_len)
Config i2s sync length.
This API config i2s sync length
- 参数
sync_len – i2s sync length
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_data_len(uint32_t data_len)
Config i2s data length.
This API config i2s data length
- 参数
data_len – i2s data length
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_pcm_dlen(uint32_t pcm_dlen)
Config i2s pcm D length of 2B+D.
This API config i2s pcm D length of 2B+D
- 参数
pcm_dlen – pcm D length
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_store_mode(i2s_lrcom_store_mode_t store_mode)
Config i2s store mode.
This API config i2s store mode
- Attention
1. LRLR mode: left and right channel data are written alternately in chronological order(L->R->L->R->……)
2. 16R16L mode: left and right channel data are written to FIFO in 32 bits, in which the lower 16 bits correspond to the left channel and the higher 16 bits correspond to the right channel({R,L}->{R,L}->……)
- 参数
store_mode – lrcom store mode LRLR/16R16L
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_clear_rxfifo(void)
clear i2s rx fifo
This API clear i2s rx fifo
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_clear_txfifo(void)
clear i2s tx fifo
This API clear i2s tx fifo
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_txint_level(i2s_txint_level_t txint_level)
config i2s tx interrupt level
This API config i2s tx interrupt level
- 参数
txint_level – tx interrupt trigger level
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_rxint_level(i2s_rxint_level_t rxint_level)
config i2s rx interrupt level
This API config i2s rx interrupt level
- 参数
rxint_level – rx interrupt trigger level
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_write_data(uint32_t channel_id, uint32_t *data_buf, uint32_t data_len)
write data to i2s tx fifo
This API write data to i2s tx fifo
Usage example:
//init i2s driver bk_i2s_driver_init(); //init i2s configure i2s_config.i2s_en = I2S_DISABLE; i2s_config.role = I2S_ROLE_MASTER; i2s_config.work_mode = I2S_WORK_MODE_I2S; i2s_config.lrck_invert = I2S_LRCK_INVERT_DISABLE; i2s_config.sck_invert = I2S_SCK_INVERT_DISABLE; i2s_config.lsb_first_en = I2S_LSB_FIRST_DISABLE; i2s_config.sync_length = 0; i2s_config.data_length = 15; i2s_config.pcm_dlength = 0; i2s_config.sample_ratio = 0; i2s_config.sck_ratio = 0; i2s_config.parallel_en = I2S_PARALLEL_DISABLE; i2s_config.store_mode = I2S_LRCOM_STORE_16R16L; i2s_config.sck_ratio_h4b = 0; i2s_config.sample_ratio_h2b = 0; i2s_config.txint_level = I2S_TXINT_LEVEL_1; i2s_config.rxint_level = I2S_RXINT_LEVEL_1; bk_i2s_init(I2S_GPIO_GROUP_0, &i2s_config); CLI_LOGI("init i2s driver and config successful \r\n"); //set sample and bitclk ratio rate.datawidth = i2s_rate_table[i].datawidth; rate.samp_rate = i2s_rate_table[i].samp_rate; bk_i2s_set_ratio(&rate); //enable i2s bk_i2s_enable(I2S_ENABLE); CLI_LOGI("enable i2s successful \r\n"); bk_i2s_get_write_ready(&write_flag); if (write_flag) bk_i2s_write_data(1, &data_buf_rl, 1);
Usage example:
//init i2s driver bk_i2s_driver_init(); //init i2s configure i2s_config_t i2s_config; i2s_config.i2s_en = I2S_DISABLE; i2s_config.role = I2S_ROLE_MASTER; i2s_config.work_mode = I2S_WORK_MODE_I2S; i2s_config.lrck_invert = I2S_LRCK_INVERT_DISABLE; i2s_config.sck_invert = I2S_SCK_INVERT_DISABLE; i2s_config.lsb_first_en = I2S_LSB_FIRST_DISABLE; i2s_config.sync_length = 0; i2s_config.data_length = 15; i2s_config.pcm_dlength = 0; i2s_config.sample_ratio = 0; i2s_config.sck_ratio = 0; i2s_config.parallel_en = I2S_PARALLEL_DISABLE; i2s_config.store_mode = I2S_LRCOM_STORE_16R16L; i2s_config.sck_ratio_h4b = 0; i2s_config.sample_ratio_h2b = 0; i2s_config.txint_level = I2S_TXINT_LEVEL_1; i2s_config.rxint_level = I2S_RXINT_LEVEL_1; bk_i2s_init(I2S_GPIO_GROUP_0, &i2s_config); CLI_LOGI("init i2s driver and config successful \r\n"); //set sample and bitclk ratio rate.datawidth = i2s_rate_table[i].datawidth; rate.samp_rate = i2s_rate_table[i].samp_rate; bk_i2s_set_ratio(&rate); //enable i2s bk_i2s_enable(I2S_ENABLE); CLI_LOGI("enable i2s successful \r\n"); //get write ready status and write data bk_i2s_get_write_ready(&write_flag); if (write_flag) bk_i2s_write_data(1, &data_buf_rl, 1);
- 参数
channel_id – i2s channel 1/2/3/4
data_buf – data to write
data_len – data length to write
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_read_data(uint32_t *data_buf, uint32_t data_len)
read data from i2s rx fifo
This API read data from i2s rx fifo
Usage example:
//init i2s driver bk_i2s_driver_init(); //init i2s configure i2s_config_t i2s_config; i2s_config.i2s_en = I2S_DISABLE; i2s_config.role = I2S_ROLE_MASTER; i2s_config.work_mode = I2S_WORK_MODE_I2S; i2s_config.lrck_invert = I2S_LRCK_INVERT_DISABLE; i2s_config.sck_invert = I2S_SCK_INVERT_DISABLE; i2s_config.lsb_first_en = I2S_LSB_FIRST_DISABLE; i2s_config.sync_length = 0; i2s_config.data_length = 15; i2s_config.pcm_dlength = 0; i2s_config.sample_ratio = 0; i2s_config.sck_ratio = 0; i2s_config.parallel_en = I2S_PARALLEL_DISABLE; i2s_config.store_mode = I2S_LRCOM_STORE_16R16L; i2s_config.sck_ratio_h4b = 0; i2s_config.sample_ratio_h2b = 0; i2s_config.txint_level = I2S_TXINT_LEVEL_1; i2s_config.rxint_level = I2S_RXINT_LEVEL_1; bk_i2s_init(I2S_GPIO_GROUP_0, &i2s_config); CLI_LOGI("init i2s driver and config successful \r\n"); //set sample and bitclk ratio rate.datawidth = i2s_rate_table[i].datawidth; rate.samp_rate = i2s_rate_table[i].samp_rate; bk_i2s_set_ratio(&rate); //enable i2s bk_i2s_enable(I2S_ENABLE); CLI_LOGI("enable i2s successful \r\n"); //get read ready status and read data bk_i2s_get_read_ready(&read_flag); if (read_flag) bk_i2s_read_data(&data_buf, 1);
- 参数
data_buf – save data read from rx fifo
data_len, : – data length to read
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_get_data_addr(i2s_channel_id_t chl_id, uint32_t *i2s_data_addr)
get i2s data address
This API get i2s data address
- 参数
i2s_data_addr – save i2s data address
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_set_samp_rate(i2s_samp_rate_t samp_rate)
config i2s sample rate
This API config i2s sample rate
- 参数
rate – sample rate and data width
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_register_i2s_isr(i2s_isr_id_t isr_id, i2s_isr_t isr, void *param)
register i2s isr
This API config register i2s isr
Usage example:
void cli_i2s_master_txudf_isr(void *param) { CLI_LOGI("enter cli_i2s_txudf_isr \r\n"); } //register isr bk_i2s_register_i2s_isr(I2S_ISR_CHL1_TXUDF, cli_i2s_master_txudf_isr, NULL); CLI_LOGI("register i2s isr successful \r\n"); //enable i2s rxovf interrupt bk_i2s_int_enable(I2S_ISR_CHL1_TXUDF, I2S_INT_ENABLE); CLI_LOGI("enable i2s interrupt successful \r\n");
- 参数
isr_id – i2s isr id
isr – isr function
param – isr parameters
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
BK_ERR_I2S_ISR_ID: i2s isr id is invalid
others: other errors.
-
bk_err_t bk_i2s_chl_init(i2s_channel_id_t chl, i2s_txrx_type_t type, uint32_t buff_size, i2s_data_handle_cb data_handle_cb, RingBufferContext **rb)
init i2s channel to send or receive data by dma
This API config dma to carry i2s data
- 参数
chl – i2s channel Tx or Rx config the size(byte) of ring buffer to send or receive data the callback called by dma finish isr when dma carry “buff_size/2” data complete save RingBufferContext, and send or receive data use it
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_chl_deinit(i2s_channel_id_t chl, i2s_txrx_type_t type)
deinit i2s channel
This API config dma to carry i2s data
- 参数
chl – i2s channel Tx or Rx config
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
others: other errors.
-
bk_err_t bk_i2s_start(void)
start i2s
This API start dma and i2s to send and receive data
Usage example:
static RingBufferContext *ch1_tx_rb; //channel 1 tx callback static int ch1_tx_data_handle_cb(uint32_t size) { ring_buffer_write(ch1_tx_rb, ch1_temp, size); return size; } i2s_config_t i2s_config = DEFAULT_I2S_CONFIG(); //init i2s driver bk_i2s_driver_init(); //init and config i2s bk_i2s_init(I2S_GPIO_GROUP_0, &i2s_config); bk_i2s_chl_init(I2S_CHANNEL_1, I2S_TXRX_TYPE_TX, 640, ch1_tx_data_handle_cb, &ch1_tx_rb); uint8_t *temp_data = (uint8_t *)os_malloc(640); os_memset(temp_data, 0x00, 640); size = ring_buffer_write(ch1_tx_rb, temp_data, 640); os_printf("ring_buffer_write, size: %d \n", size); os_free(temp_data); bk_i2s_start();
- 返回
BK_OK: succeed
BK_ERR_AUD_NOT_INIT: i2s driver is not init
BK_ERR_I2S_ISR_ID: i2s isr id is invalid
others: other errors.
API Typedefs
Header File
Structures
-
struct i2s_int_config_t
-
struct i2s_config_t
Macros
-
BK_ERR_I2S_NOT_INIT
I2S driver not init
-
BK_ERR_I2S_PARAM
I2S parameter invalid
-
BK_ERR_I2S_ISR_ID
I2S isr id invalid
-
DEFAULT_I2S_CONFIG()
-
DEFAULT_PCM_CONFIG()
-
DEFAULT_TDM_CONFIG()
-
DEFAULT_2BD_CONFIG()
Type Definitions
-
typedef void (*i2s_isr_t)(void *param)
-
typedef int (*i2s_data_handle_cb)(uint32_t size)
Enumerations
-
enum i2s_gpio_group_id_t
Values:
-
enumerator I2S_GPIO_GROUP_0
I2S gpio group 0: GPIO6, GPIO7, GPIO8, GPIO9
-
enumerator I2S_GPIO_GROUP_1
I2S gpio group 1: GPIO40, GPIO41, GPIO42, GPIO43
-
enumerator I2S_GPIO_GROUP_MAX
-
enumerator I2S_GPIO_GROUP_0
-
enum i2s_isr_id_t
Values:
-
enumerator I2S_ISR_CHL1_TXUDF
I2S channel1 tx_udf interrupt
-
enumerator I2S_ISR_CHL1_RXOVF
I2S channel1 rx_ovf interrupt
-
enumerator I2S_ISR_CHL1_TXINT
I2S channel1 tx interrupt
-
enumerator I2S_ISR_CHL1_RXINT
I2S channel1 rx interrupt
-
enumerator I2S_ISR_CHL2_TXUDF
I2S channel2 tx_udf interrupt
-
enumerator I2S_ISR_CHL2_RXOVF
I2S channel2 rx_ovf interrupt
-
enumerator I2S_ISR_CHL2_TXINT
I2S channel2 tx interrupt
-
enumerator I2S_ISR_CHL2_RXINT
I2S channel2 rx interrupt
-
enumerator I2S_ISR_CHL3_TXUDF
I2S channel3 tx_udf interrupt
-
enumerator I2S_ISR_CHL3_RXOVF
I2S channel3 rx_ovf interrupt
-
enumerator I2S_ISR_CHL3_TXINT
I2S channel3 tx interrupt
-
enumerator I2S_ISR_CHL3_RXINT
I2S channel3 rx interrupt
-
enumerator I2S_ISR_MAX
-
enumerator I2S_ISR_CHL1_TXUDF
-
enum i2s_en_t
Values:
-
enumerator I2S_DISABLE
I2S disable
-
enumerator I2S_ENABLE
I2S enable
-
enumerator I2S_EN_MAX
-
enumerator I2S_DISABLE
-
enum i2s_role_t
Values:
-
enumerator I2S_ROLE_SLAVE
I2S role: slave
-
enumerator I2S_ROLE_MASTER
I2S role: master
-
enumerator I2S_ROLE_MAX
-
enumerator I2S_ROLE_SLAVE
-
enum i2s_work_mode_t
Values:
-
enumerator I2S_WORK_MODE_I2S
I2S work mode: I2S (Philips)
-
enumerator I2S_WORK_MODE_LEFTJUST
I2S work mode: Left Justified
-
enumerator I2S_WORK_MODE_RIGHTJUST
I2S work mode: Right Justified
-
enumerator I2S_WORK_MODE_RSVD
I2S work mode: reserved for future use
-
enumerator I2S_WORK_MODE_SHORTFAMSYNC
I2S work mode: Short Frame Sync
-
enumerator I2S_WORK_MODE_LONGFAMSYNC
I2S work mode: Long Frame Sync
-
enumerator I2S_WORK_MODE_NORMAL2BD
I2S work mode: Normal 2B+D
-
enumerator I2S_WORK_MODE_DELAY2BD
I2S work mode: Delay 2B+D
-
enumerator I2S_WORK_MODE_MAX
-
enumerator I2S_WORK_MODE_I2S
-
enum i2s_lrck_invert_en_t
Values:
-
enumerator I2S_LRCK_INVERT_DISABLE
I2S lrck invert disable
-
enumerator I2S_LRCK_INVERT_ENABLE
I2S lrck invert enable
-
enumerator I2S_LRCK_INVERT_MAX
-
enumerator I2S_LRCK_INVERT_DISABLE
-
enum i2s_sck_invert_en_t
Values:
-
enumerator I2S_SCK_INVERT_DISABLE
I2S sck invert disable
-
enumerator I2S_SCK_INVERT_ENABLE
I2S sck invert enable
-
enumerator I2S_SCK_INVERT_MAX
-
enumerator I2S_SCK_INVERT_DISABLE
-
enum i2s_lsb_first_en_t
Values:
-
enumerator I2S_LSB_FIRST_DISABLE
I2S lsb first disable
-
enumerator I2S_LSB_FIRST_ENABLE
I2S lsb first enable
-
enumerator I2S_LSB_FIRST_EN_MAX
-
enumerator I2S_LSB_FIRST_DISABLE
-
enum i2s_parallel_en_t
Values:
-
enumerator I2S_PARALLEL_DISABLE
I2S parallel disable
-
enumerator I2S_PARALLEL_ENABLE
I2S parallel enable
-
enumerator I2S_PARALLEL_EN_MAX
-
enumerator I2S_PARALLEL_DISABLE
-
enum i2s_lrcom_store_mode_t
Values:
-
enumerator I2S_LRCOM_STORE_LRLR
I2S lrcom store mode: L->R->L->R
-
enumerator I2S_LRCOM_STORE_16R16L
I2S lrcom store mode: {16bitR,16bitL}
-
enumerator I2S_LRCOM_STORE_MODE_MAX
-
enumerator I2S_LRCOM_STORE_LRLR
-
enum i2s_txint_level_t
Values:
-
enumerator I2S_TXINT_LEVEL_1
I2S tx_int level: 1
-
enumerator I2S_TXINT_LEVEL_8
I2S tx_int level: 8
-
enumerator I2S_TXINT_LEVEL_16
I2S tx_int level: 16
-
enumerator I2S_TXINT_LEVEL_24
I2S tx_int level: 24
-
enumerator I2S_TXINT_LEVEL_MAX
-
enumerator I2S_TXINT_LEVEL_1
-
enum i2s_rxint_level_t
Values:
-
enumerator I2S_RXINT_LEVEL_1
I2S rx_int level: 1
-
enumerator I2S_RXINT_LEVEL_8
I2S rx_int level: 8
-
enumerator I2S_RXINT_LEVEL_16
I2S rx_int level: 16
-
enumerator I2S_RXINT_LEVEL_24
I2S rx_int level: 24
-
enumerator I2S_RXINT_LEVEL_MAX
-
enumerator I2S_RXINT_LEVEL_1
-
enum i2s_int_en_t
Values:
-
enumerator I2S_INT_DISABLE
I2S interrupt disable
-
enumerator I2S_INT_ENABLE
I2S interrupt enable
-
enumerator I2S_INT_EN_MAX
-
enumerator I2S_INT_DISABLE
-
enum i2s_channel_id_t
Values:
-
enumerator I2S_CHANNEL_1
I2S channel: 1
-
enumerator I2S_CHANNEL_2
I2S channel: 2
-
enumerator I2S_CHANNEL_3
I2S channel: 3
-
enumerator I2S_CHANNEL_MAX
-
enumerator I2S_CHANNEL_1
-
enum i2s_data_width_t
Values:
-
enumerator I2S_DATA_WIDTH_8
I2S data width: 8
-
enumerator I2S_DATA_WIDTH_16
I2S data width: 16
-
enumerator I2S_DATA_WIDTH_24
I2S data width: 24
-
enumerator I2S_DATA_WIDTH_32
I2S data width: 32
-
enumerator I2S_DATA_WIDTH_8
-
enum i2s_samp_rate_t
Values:
-
enumerator I2S_SAMP_RATE_8000
I2S sample rate: 8K
-
enumerator I2S_SAMP_RATE_12000
I2S sample rate: 12K
-
enumerator I2S_SAMP_RATE_16000
I2S sample rate: 16K
-
enumerator I2S_SAMP_RATE_24000
I2S sample rate: 24K
-
enumerator I2S_SAMP_RATE_32000
I2S sample rate: 32K
-
enumerator I2S_SAMP_RATE_48000
I2S sample rate: 48K
-
enumerator I2S_SAMP_RATE_96000
I2S sample rate: 96K
-
enumerator I2S_SAMP_RATE_8018
I2S sample rate: 8.0182K
-
enumerator I2S_SAMP_RATE_11025
I2S sample rate: 11.025K
-
enumerator I2S_SAMP_RATE_22050
I2S sample rate: 22.050K
-
enumerator I2S_SAMP_RATE_44100
I2S sample rate: 44.1K
-
enumerator I2S_SAMP_RATE_88200
I2S sample rate: 88.2K
-
enumerator I2S_SAMP_RATE_MAX
-
enumerator I2S_SAMP_RATE_8000