CAN
CAN 简介
控制器局域网 (CAN, Controller Area Network) 总线是一种强大的串行总线系统,可实现网络节点之间高效可靠的通信。它使用多主总线配置并在没有 CPU 干预的情况下管理错误检测和处理。
CAN 控制器特性
- 1.支持 CAN 协议规范
CAN 2.0B(最多 8 字节有效载荷,经 Bosch 参考模型验证) CAN FD(最多 64 字节有效载荷,符合 ISO 11898-1:2015 或非 ISO Bosch)
- 2.可编程数据速率
CAN 2.0B 数据速率高达 1 Mbit/s CAN FD 数据速率高达 2 Mbit/s
- 3.可编程波特率预分频器,分频系数介于 1 到 256 之间
详细信息需要查看寄存器文档及设计文档
- 4.两个发送缓冲器
一个主发送缓冲器 (PTB) 一个可选的可配置的辅助发送缓冲器 (STB)
- 5.通用参数选择缓冲区时隙的数量
该部分使用默认配置,不建议进行修改。
- 6.可在 FIFO 或优先决策模式下运行
默认使用FIFO模式,优先决策模式需要配置,参考API
- 7.独立和可编程的内部 29 位验收过滤器
可通过通用参数在 1 至 16 范围内选择验收过滤器数量
- 8.扩展功能
单发传输模式(用于 PTB 和/或 STB) 只听模式 环回模式(内部和外部) 收发器待机模式
- 9.扩展的状态和错误报告
捕获最后发生的错误类型和仲裁丢失的位置 可编程错误警告限制
- 10.可配置的中断源
默认只对用户支持TX和RX回调函数的注册使用
- 11.时间戳:
具有部分硬件支持的 ISO 11898-4 时间触发 CAN (TTCAN) CiA 603 时间戳
- 12.安全相关功能
具有附加地址保护的 ECC 内存保护 内部逻辑核心的空间冗余
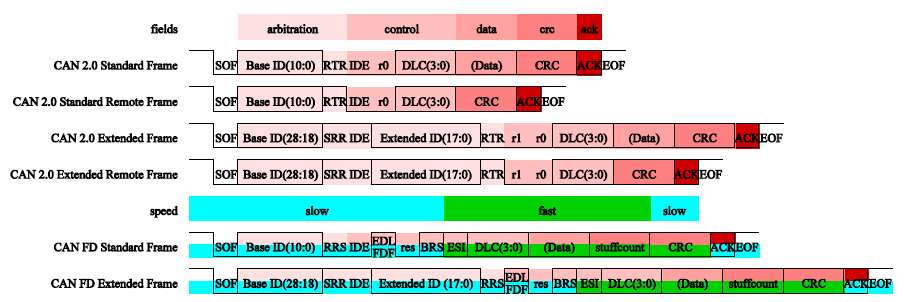
CAN 2.0 和 CAN FD 帧
CAN FD 是 CAN 2.0 的协议扩展。主要区别是:
数据有效载荷:CAN 2.0 最多 8 个字节,CAN FD 最多 64 个字节 一种用于 CAN 2.0 的可配置比特率,但用于 CAN FD 的是 2 种:仲裁速度慢,数据阶段速度快
CAN 2.0 和 CAN FD 的所有类型的帧如下图所示。
CAN 2.0 And CAN FD
Bosch 的 CAN FD 规范(非 ISO)使用名称 EDL,而 CAN FD ISO 规范使用名称 FDF 表示相同的位。两个名字都是同义词。本章节使用名称 FDF。 对于 CAN FD ISO 帧,填充计数作为 CRC 字段的一部分传输。对于 CAN FD 非 ISO 帧,填充计数不是帧的一部分。此外,CRC 校验器对非 ISO 和 ISO 帧有不同的初始化。因此 ISO 和非 ISO 帧是不兼容的。 CAN 控制器 核心中的 CAN 协议机器自动发送和接收帧并内置相应的控制和状态位。主机控制器需要选择所需的帧类型(IDE、RTR、FDF)、选择标识符并设置数据有效载荷。
缩写词在 CAN 规范在下表中进行了简要说明。对于经典 CAN 帧 (CAN 2.0),一些位名称已使用 CAN FD ISO 规范重命名,但此处仍使用较旧的名称以便于向后引用。
缩写 |
描述 |
注释 |
|---|---|---|
ID |
标识符 IDentifier |
|
RTR |
远程传输请求 Remote Transmission Request |
远程或数据帧 |
SRR |
替代远程请求 Substitute Remote Request |
|
RRS |
远程请求替换 Remote Request Substitution |
|
IDE |
标识符扩展 IDentifier Extension |
标准或扩展帧 |
DLC |
数据长度代码 Data Length Code |
有效载荷字节数 |
EDL |
扩展数据长度 Extended Data Length |
CAN 2.0 或 CAN FD 帧 |
FDF |
FD 格式指示器 FD Format indicator (=EDL) |
CAN 2.0 或 CAN FD 帧 |
BRS |
比特率开关 Bit Rate Switch |
|
ESI |
错误状态指示器 错误State Indicator |
CAN 驱动的宏定义开关
CONFIG_CAN CAN驱动的总开关, 默认只编译CAN驱动部分,及主要can_driver.c
CONFIG_CAN_TEST 在CONFIG_CAN打开的状态下,打开测试部分进行单步测试,主要can_test.c
CONFIG_CAN_DEMO 在CONFIG_CAN打开的状态下,打开示例部分进行用例演示,主要can_demo.c
1、只打开驱动部分时,CONFIG_CAN=y
2、进行API进行逐个测试时,CONFIG_CAN=y CONFIG_CAN_TEST=y
3、进行实例进行测试验证时,CONFIG_CAN=y CONFIG_CAN_DEMO=y
CAN API使用必要了解的结构体说明
- can_config_t:
- protocol
需要选择协议CAN 2.0B或CAN FD
- s_speed
S速度(Slow Speed)S速度是CAN总线的低速模式,其数据传输速率为125 kbps或更低。这种模式主要用于需要低成本、低功耗和低带宽的应用
- f_speed
F速度(Fast Speed)F速度是CAN总线的标准速度模式,其数据传输速率为500 kbps。这种模式主要用于需要高实时性和低延迟的应用
- tx_size
kfifo的深度,将要发送的数据暂存到软件FIFO中,用于对硬件tx fifo的扩展
- rx_size
kfifo的深度,将接收到的数据暂存到软件FIFO中,便于对硬件rx fifo的扩展
- can_frame_tag_t:
- id
标识符 IDentifier
- ide
标识符扩展 IDentifier Extension
- rtr
远程传输请求 Remote Transmission Request,只有2.0可以使用
- fdf
FD 格式指示器 FD Format indicator (=EDL)
- brs
比特率开关 Bit Rate Switch,只有FD可用
- esi
错误状态指示器 Error State Indicator,只有FD RX可用
ttsen Time Triggered Switch,时间触发切换。它是一种用于CAN FD的技术,允许在特定时间触发切换位速率或其他参数
- can_frame_s:
- tag
详细信息查看can_frame_tag_t
- size
发送数据的size
- data
发送数据的buffer指针
- can_acc_mask_ide_e:
- CAN_ACCEPT_BOTH
标准和扩展帧都支持
- CAN_ACCEPT_STANDARD
仅支持标准帧
- CAN_ACCEPT_EXTENDED
仅支持扩展帧
- drv_switch_e:
DRIVER_DISABLE 不同协议驱动切换关闭
DRIVER_ENABLE 不同协议驱动切换打开
- can_acc_filter_cmd_s:
- aide
参考can_acc_mask_ide_e描述
- code
ID不要超过29 bits
- mask
对应的bit置位标志接收该ID设备的数据 1 disable, 0 enable
- seq
0 to MAX_ACF_NUM, default 0 accept all
- onoff
功能参考drv_switch_e描述
- can_callback_des_t:
- cb
回调函数指针(can_callback)
- *param
私有参数
CAN API使用说明
- bk_err_t bk_can_init(can_dev_t *can);
初始化配置,注意查看上述结构体的配置
- bk_err_t bk_can_driver_init(void);
加载驱动
- bk_err_t bk_can_driver_deinit(void);
卸载驱动
- bk_err_t bk_can_deinit(void);
卸载配置,释放资源
- bk_err_t bk_can_receive(uint8_t *data, uint32_t expect_size, uint32_t *recv_size, uint32_t timeout);
接收数据,data是接收的buffer, expect_size是接收的数据长度,recv_size是实际数据长度,timeout是接收等待的时间 接收数据分为两种,一种中断通知然后交给下半部进行数据读取。另一种是读取等待总线数据,接收到数据后将数据读走
- bk_err_t bk_can_send_ptb(can_frame_s *frame);
优先发送数据,参数参考上一小节结构体介绍
- bk_err_t bk_can_send(can_frame_s *frame, uint32_t timeout);
发送数据,等待数据发送完成
- bk_err_t bk_can_acc_filter_set(can_acc_filter_cmd_s *cmd);
硬件过滤器配置,只接受部分ID的数据,减少处理
- void bk_can_register_isr_callback(can_callback_des_t *rx_cb, can_callback_des_t *tx_cb);
注册TXRX的中断处理回调函数,注意这两个函数都是在中断中执行,注意回调函数的处理内容
CAN Pin and GPIO Map
CAN Pin |
BK7258_CP0 |
|---|---|
CAN TX |
44 |
CAN RX |
45 |
CAN STBY |
46 |
注意:这三个PIN还与其他功能复用 GPIO_44, SPI0_SCK(IO)/ADC0(Z)/RGB_b[6]/I8080_d3(O)/I2S2_SCK(IO)
GPIO_45, SPI0_NSS(IO)/ADC7(Z)/RGB_b[5]/I8080_d2(O)/I2S2_SYNC(IO)
GPIO_46, SPI0_MOSI(IO)/ENET_PHY_INT(I)/TOUCH[140]/RGB_b[4]/I8080_d1(O)/I2S2_DIN(IO)