硬件旋转
1、功能概述
本文档主要介绍了硬件旋转的功能以及API使用。
硬件旋转的主要功能如下:
支持输入为YUV422,输出为RGB565,无旋转
支持输入RGB565数据,输出为RGB565,正/逆旋转90度
支持输入为YUV422, 输出为RGB565,正/逆旋转90度
旋转硬件是按块旋转,其中块与块旋转之间可以配置延时,减少总线压力
支持块watermark和complete中断
硬件旋转的主要限制如下:
注意
旋转块长宽必须为偶数行
旋转块长的宽必须被图片长宽整除,如果不是整除,会导致旋转后显示异常
设置的源/目标地址需要4字节对齐,因为YUV数据1个word的连续性
只支持旋转后输出为RGB565的数据;
2、参考代码
参考工程为 DOORBELL工程
硬件旋转的组件代码请参考
components/multimedia/lcd/lcd_rotate.c和components/image_codec_unit/src/pipeline/yuv_rotate_pipeline.c硬件旋转驱动代码参考 hw_rotate驱动代码
3、API使用说明
硬件旋转的使用比较简单,只需要三步:
初始化硬件模块,用户可以选择使能中断的类型,工程中默认都打开,其中ROTATE_WARTERMARK_INT为旋转一半中断。
bk_rott_driver_init();
bk_rott_int_enable(ROTATE_COMPLETE_INT | ROTATE_CFG_ERR_INT | ROTATE_WARTERMARK_INT, 1);
bk_rott_isr_register(ROTATE_COMPLETE_INT, rotate_complete_cb);
bk_rott_isr_register(ROTATE_WARTERMARK_INT, rotate_watermark_cb);
bk_rott_isr_register(ROTATE_CFG_ERR_INT, rotate_cfg_err_cb);
配置旋转参数,并使能旋转:
rott_config_t rott_cfg = {0};
dst->fmt = PIXEL_FMT_RGB565_LE;
rott_cfg.input_addr = src->frame; //旋转源数据地址
rott_cfg.output_addr = dst->frame; //旋转输出地址
rott_cfg.rot_mode = ROTATE_90; //旋转角度配置
switch (src->fmt) // 数据源的像素格式
{
case PIXEL_FMT_YUYV:
rott_cfg.input_fmt = src->fmt;
rott_cfg.input_flow = ROTT_INPUT_NORMAL;
rott_cfg.output_flow = ROTT_OUTPUT_NORMAL;
break;
case PIXEL_FMT_VUYY:
rott_cfg.input_fmt = src->fmt;
rott_cfg.input_flow = ROTT_INPUT_NORMAL;
rott_cfg.output_flow = ROTT_OUTPUT_NORMAL;
break;
case PIXEL_FMT_RGB565_LE:
rott_cfg.input_fmt = src->fmt;
rott_cfg.input_flow = ROTT_INPUT_REVESE_HALFWORD_BY_HALFWORD;
rott_cfg.output_flow = ROTT_OUTPUT_NORMAL;
break;
case PIXEL_FMT_RGB565:
default:
rott_cfg.input_fmt = src->fmt;
rott_cfg.input_flow = ROTT_INPUT_REVESE_HALFWORD_BY_HALFWORD;
rott_cfg.output_flow = ROTT_OUTPUT_NORMAL;
break;
}
rott_cfg.picture_xpixel = src->width;
rott_cfg.picture_ypixel = src->height;
rott_config(&rott_cfg);
bk_rott_enable();
旋转完成后,进入旋转完成中断
4、 旋转和DMA2D结合,实现按行旋转
对于BK7258现有的工程,对图片解码有整帧和按行实现的两种方案,那么对于按行解码,就必须按行旋转,由于旋转模块的配置只有整帧旋转的功能,所以
需要将一次按行解码的数据作为一整帧去旋转,此时,需要开辟一个内存暂存旋转之后的数据,然后通过DMA2D组合为一整帧图片,
按行旋转的代码在 components/image_codec_unit/src/pipeline/yuv_rotate_pipeline.c 中,实现框图可以参考下图:
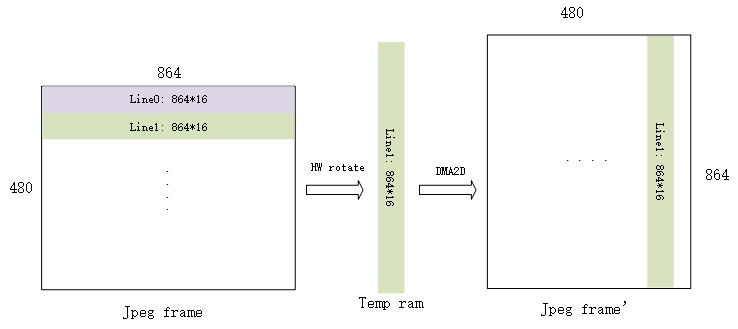
Figure. 整帧图片按行旋转
其中:
rott_cfg.picture_xpixel = 864;
rott_cfg.picture_ypixel = 16;