Quick Start Guide
This article demonstrates:
Armino code and toolchain download
Setup software development environment
How to configure Armino project
How to build the project and flash the bin to board
Intruduction
BK7236 is a SoC that integrates the following features:
Wi-Fi 6 (2.4 GHz Band)
Bluetooth Low Energy 5.4
ARMv8-M Star (M33F) MCU
Multiple peripherals
Built-in TrustEngine security hardware
Powered by 22nm technology, BK7236 provides a robust, highly integrated platform, which helps meet the continuous demands for efficient power usage, compact design, security, high performance, reliability and high security.
Beken provides basic hardware and software resources to help application developers realize their ideas using BK7236 series hardware. The software development framework Armino is intended for development of Internet-of-Things (IoT) applications with Wi-Fi, Bluetooth, power management, security and other system features.
Preparation
Hardware:
BK7236 Demo board
BKFIL.exe
PC(Windows & Ubuntu)
Note
Armino only supports compiling on Linux platform and firmware burning on Windows platform. Therefore, we need two computers, one Linux platform and one Windows platform. Of course, we can also install Linux virtual machine on Windows platform only
Software:
GCC ARM tool chain, used to compile BK7236
Build tools, including CMake
Armino source code
BKFIL.exe
Introdection to Development Board
Click the following link to learn more about the development boards supported by Armino:
Armino SDK Code download
We can download Armino from gitlab:
mkdir -p ~/armino
cd ~/armino
git clone http://gitlab.bekencorp.com/wifi/armino.git
We can also download Armino from github:
mkdir -p ~/armino
cd ~/armino
git clone https://github.com/bekencorp/armino.git
Note
The gitlab always has the latest Armino code, only authorised account can download the code. Please contact the your BK7236 project owner to get relevant accounts.
On the other hand, Github only has the stable Armino code.
Setup Build Environment
Note
- Armino, currently supports compiling in Linux environment. This chapter willtake Ubuntu 20.04 LTS
as an example to introduce the construction of the entire compiling environment.
Install Tool Chain
Click 下载 to download the BK7236 toolchain.
After downloading the tool kit, decompress it to ‘/opt/’:
$ sudo tar -zxvf downloads/gnu-rm/9-2020q2/gcc-arm-none-eabi-9-2020-q2-update-x86_64-linux.tar.bz2 -C /
Note
Tool chain the default path is configured in the middleware/soc/bk7236/bk7236.defconfig, you can modify CONFIG_TOOLCHAIN_PATH to set to your owner toolchain path:
CONFIG_TOOLCHAIN_PATH=”/opt/gcc-arm-none-eabi-9-2020-q2-update/bin”
Install Depended libraries
Enter the following command in the terminal to install pythonCMakeNinja:
sudo dpkg --add-architecture i386
sudo apt-get update
sudo apt-get install build-essential cmake python3 python3-pip doxygen ninja-build libc6:i386 libstdc++6:i386 libncurses5-dev lib32z1 -y
Install python dependencies
Enter the following command to install python dependencies:
sudo pip3 install sphinx_rtd_theme future breathe blockdiag sphinxcontrib-seqdiag sphinxcontrib-actdiag sphinxcontrib-nwdiag sphinxcontrib.blockdiag
If you default Python is Python2, please set it to Python3:
sudo ln -s /usr/bin/python3 /usr/bin/python
Build The Project
Run following commands to build BK7236 app project:
cd ~/armino
make bk7236
The app project startup:
WiFi/BLE
Common pheripheral drivers
Armino default Cli
You can build other projects with PROJECT parameter, e.g. run “make bk7236 PROJECT=security/secureboot” can build projects/security/secureboot etc.
Configuration project
We can also use the project configuration file for differentiated configuration:
Project Profile Override Chip Profile Override Default Configuration
Example: config >> bk7236.defconfig >> KConfig
+ Example of project configuration file:
projects/app/config/bk7236/config
+ Sample chip configuration file:
middleware/soc/bk7236/bk7236.defconfig
+ Sample KConfig configuration file:
middleware/arch/cm33/Kconfig
components/bk_cli/Kconfig
Click Kconfig Configuration to learn more about Armino Kconfig.
New project
The default project is projects/app. For new projects, please refer to projects/harmony project
Burn Code
On the Windows platform, Armino currently supports UART burning.
Burn through serial port
Note
Armino supports UART burning. It is recommended to use the CH340 serial port tool board to download.
Serial port burning tool is shown in the figure below:
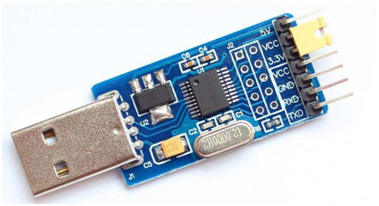
UART
Download burning tools (BKFILL.exe):
http://dl.bekencorp.com/tools/flash/ Get the latest version in this directory. Ex:BEKEN_BKFIL_V2.0.7.5_20221220.zip
The snapshot of BKFILL.exe downloading.
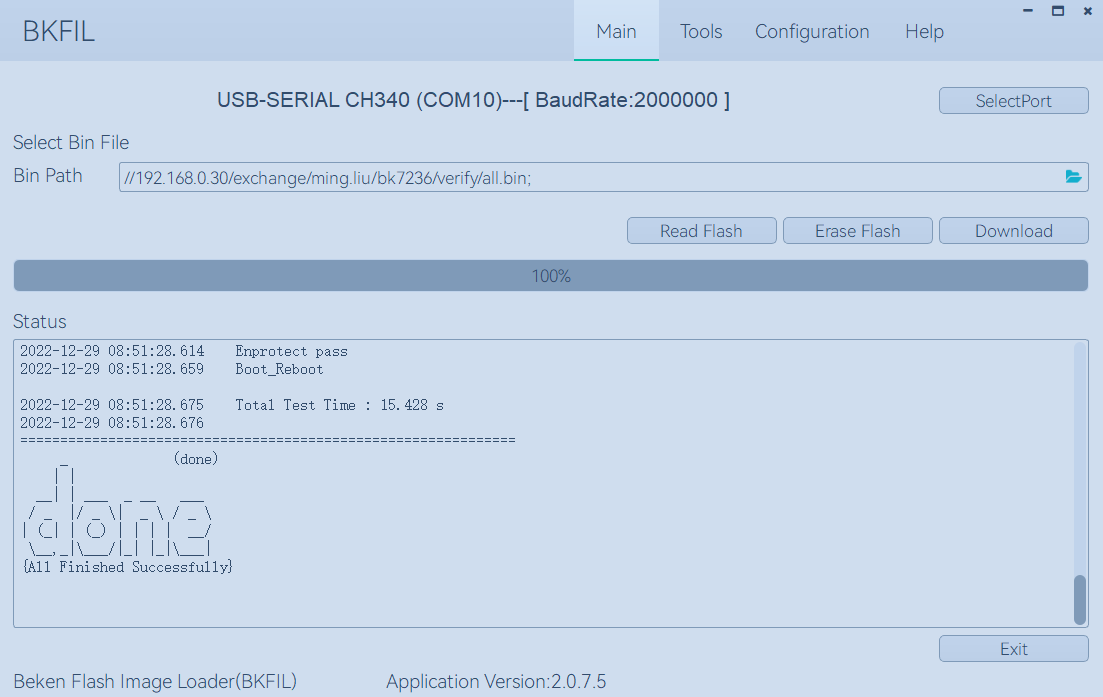
BKFIL GUI
Burn the serial port UART1, click Download to burn the image, and then power down and restart the device after burning.
Click BKFIL to learn more about BKFIL.
Serial port Log and Command Line
Currently the BK7236 use the UART1 as the Log output and Cli input; You can get the supported command list through the help command.